
Revolutionierung des Spritzgießens: Die Kraft der Automatisierung zur Effizienzsteigerung und Kostensenkung

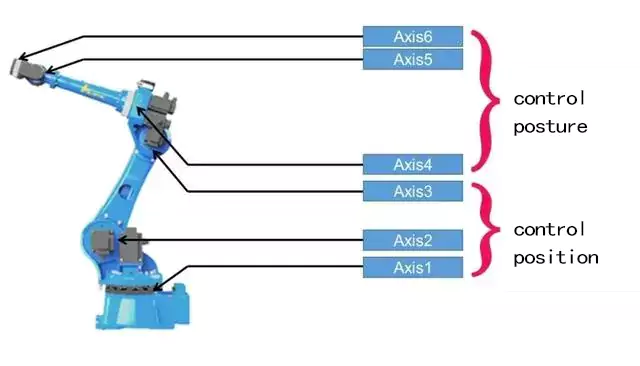
Automatisierung beim Spritzgießen Automatisierung beim Spritzgießen Arten der Automatisierung Arten der Automatisierung 1. Sechsachsige Roboter 2. SCARA-Roboter 3. Auswirkungen kartesischer Roboter auf die Effizienz Wie Automatisierung die Effizienz verbessert 1. Beispiele aus der Praxis Kostensenkung beim Spritzgießen Wie Automatisierung…